大数据
SDRAM
绘图机器人
服务监控
ldap
B树
fastapi
verilog
web3py
scrapy
服务容错
图像按钮
默认浏览器
图像分类
python新手
期权
局域网
json schema
数据
AMD
PID
2024/4/11 15:01:42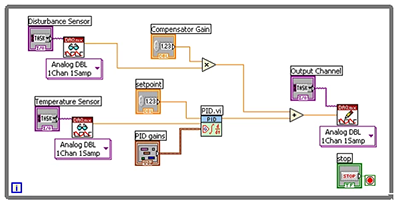
LabVIEW中PID控制的的高级功能
LabVIEW中PID控制的的高级功能
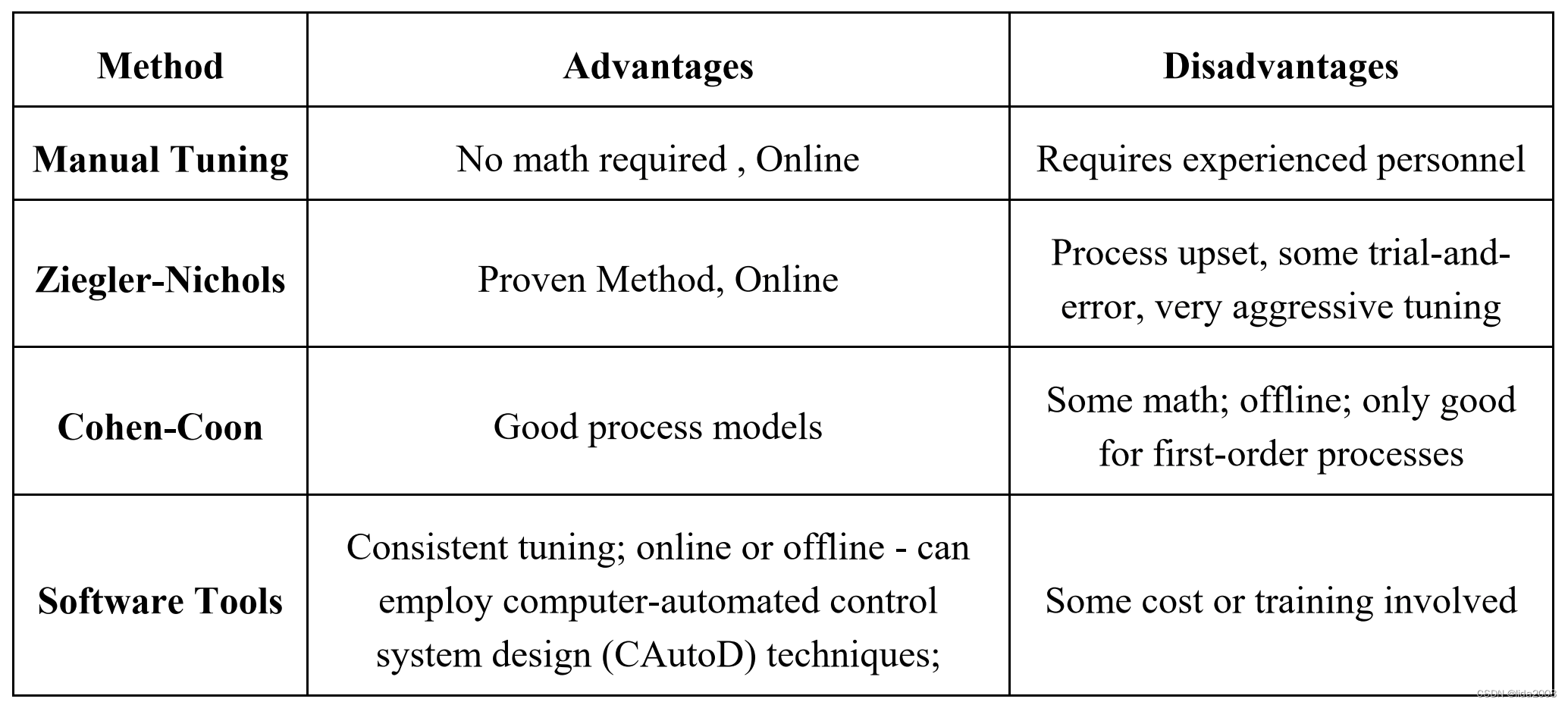
比例-积分-微分(PID)控制占当今控制和自动化应用的90%以上,主要是因为它是一种有效且简单的解决方案。虽然PID算法最初用于线性、时不变系统,但现在已经发展到控制具有复杂动力学的系统。在现实世界…
simulink PID控制
系列文章目录 文章目录系列文章目录前言一、非线性系统线性化原理二、反馈控制开环控制反馈or闭环控制PID ControllerPID微调案例总结前言
将非线性系统近似线性化PIDblock与微调 提示:以下是本篇文章正文内容,下面案例可供参考
一、非线性系统线性化 …
多旋翼无人机仿真 rotors_simulator:基于PID控制器的位置控制
多旋翼无人机仿真 rotors_simulator:基于PID控制器的位置控制---航向控制前言航向控制P控制收敛结果收敛过程PD控制收敛结果收敛过程结果总结前言
无人机(Unmanned Aerial Vehicle),指的是一种由动力驱动的、无线遥控或自主飞行、…

MATLAB:电机控制(Motor Control)
目录 前言1、Overview1.1、Specific objectives1.2、Resources1.3 、Industrial context1.4 、Architecture of the system1.5 、Approach/Steps 2、MODELLING THE MOTOR AND THE LOAD2.1Simulate a DC motor by its physical model2.2、Modelling the motor / load by its mat…
V-REP循迹小车仿真(matlab)
利用MATLAB与VREP做了一个循迹小车的联合仿真,用到了视觉传感器,导入mesh,等一些操作. 文章目录最终效果VREP中的设计Matlab中的设计其他设置最终效果 VREP中的设计
可以参考https://www.jianshu.com/p/eb3f38c0c5fa的前三篇教程,跟着这个教程做完第三篇的设计后,进行以下几步…

电机控制电流环设计笔记
参考:
b站:豪底狄:《PID调节器》第一部分:电流环设计InstaSPIN-FOC™ 和 InstaSPIN-MOTION™用户指南
阅读TI的文档,把陈博的视频又看了一遍,自己整理抄了一遍,做了个笔记。主要是理论公式的推…

电机FOC电流环参数整定
PMSM模型:
交直轴的电压方程为: {udRidLddiddt−ωeLqiquqRiqLqdiqdtωeLdidωeφm\left\{ \begin{array}{l} u_dRi_dL_d\frac{di_d}{dt}-\omega _eL_qi_q\\ u_qRi_qL_q\frac{di_q}{dt}\omega _eL_di_d\omega _e\varphi _m\\ \end{array} \right. {udRidLddt…
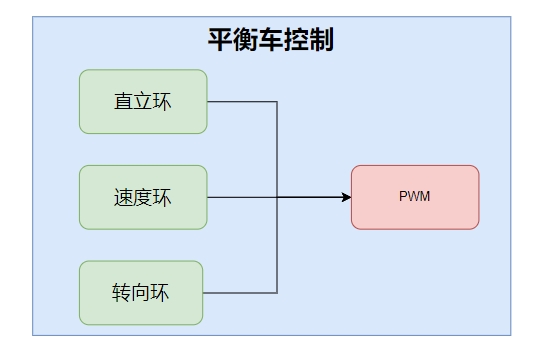
FPGA实现平衡小车(文末开源!!)
FPGA平衡小车
一. 硬件介绍
底板资源: TB6612电机驱动芯片 * 2 MPU6050陀螺仪 WS2812 RGB彩色灯 * 4 红外接收头 ESP-01S WIFI
核心板
微相 A7_Lite Artix-7 FPGA开发板
电机采用的是平衡小车之家的MG310(GMR编码器)电机。底板上有两个TB6612芯片,可以驱动…
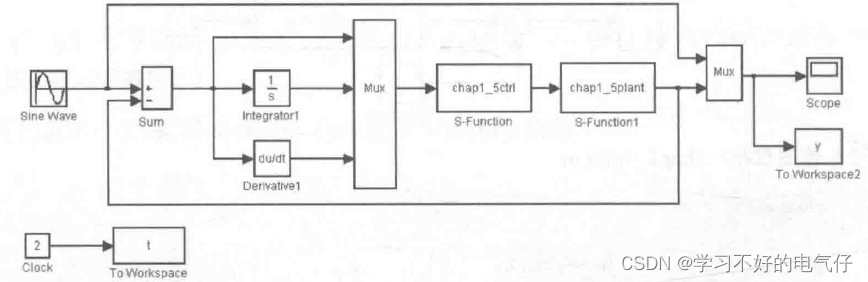
线性时变系统的PID控制-2
在线性时变系统的PID控制-1的基础上采用S函数进行Simulink仿真。被控对象的描述方式可变换为:在S函数中,采用初始化、微分函数和输出函数,即mdllnitializeSizes函数、mdIDerivatives函数和mdlOutputs函数。在初始化中采用sizes结构࿰…
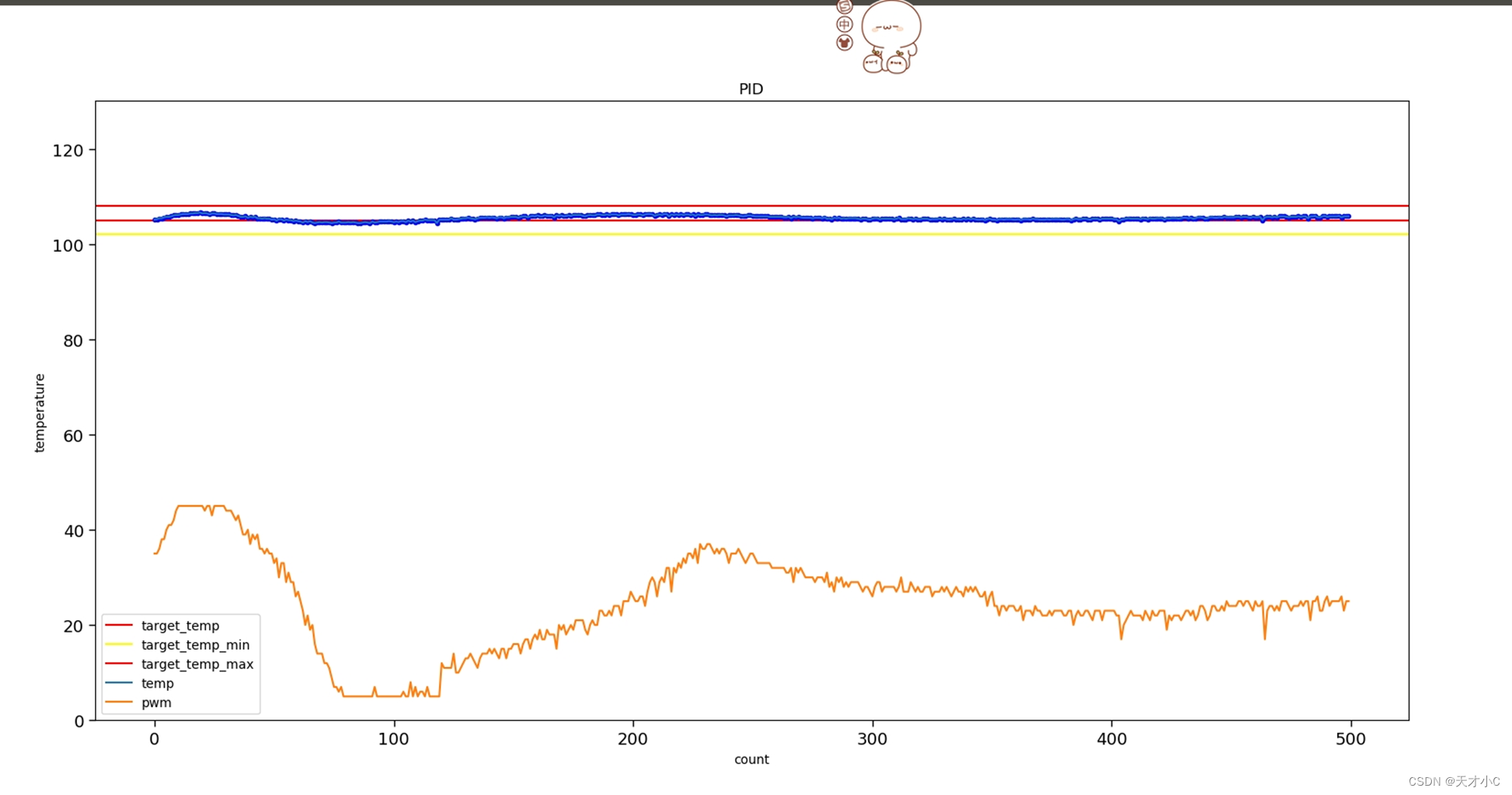
python实现PID温控算法
PID算法介绍 PID算法是一种常用的控制算法,用于调节和稳定控制系统的输出。 PID代表比例(Proportional)、积分(Integral)和微分(Derivative) 比例(Proportional)…

Linux中pid与tid的异同及top中pid字段含义
简介 pid(process identifier),进程id。在整个操作系统中,每个进程的id唯一。tid(thread identifier),线程id。在一个进程中,每个线程的id唯一,不同的进程可能有tid相同的线程。
这只是简单地描述,能够应付…
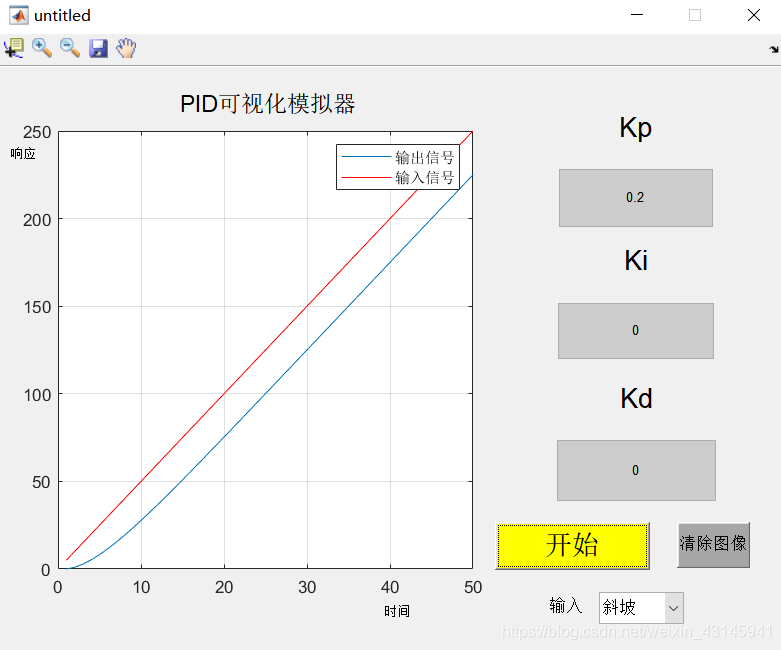
MATLAB GUI实践——PID控制器界面
GUI 图形用户界面(Graphical User Interface,简称 GUI,又称图形用户接口)是指采用图形方式显示的计算机操作用户界面。 图形用户界面是一种人与计算机通信的界面显示格式,允许用户使用鼠标等输入设备操纵屏幕上的图标或…
PID控制算法 – 1、Sample Time(采样时间)
前面介绍的PID代码虽然能跑起来,但是还存在一些问题。
PID控制算法 – 0、PID原理_资深流水灯工程师的博客-CSDN博客
对应的代码也重新贴一下,方便比较
/*工作变量*/
unsigned long lastTime;
double Input, Output, Setpoint;
double errSum, lastEr…

【PID学习笔记10】PID公式分析
写在前面
前面已经将控制系统的基础知识点过了一遍,从本节开始,将正式学习PID控制的相关知识,将会从基本的PID公式概念解释,再基于matlab仿真介绍十几种数字式PID的基本概念。本文重点讲解PID的经典公式。
一、连续与离散的概念…
【PID精讲12】基于MATLAB和Simulink的仿真教程
文章目录 写在前面一、基于Simulink的仿真1. 新建Simulink模型2. 保存Simulink模型3. 建模4. 运行二、基于MATLAB的仿真1. 编码2. 运行3. 调整曲线格式4. 导出图窗写在前面
第11讲介绍的连续系统的数字PID仿真是基于 Matlab的 M 语言实现的,对于初学者或者工程应用人员来说,…
增益自适应PI控制器+死区过滤器(Smart PLC向导PID编程应用)
增益自适应和死区过滤器如果不和S7-200 SMART PLC PID向导组合实现,大家可以自行编写优化的PID指令。算法起始非常简单,具体实现过程大家可以参看下面的文章链接,
三菱增量式PID+死区过滤器
三菱PLC增量式PID算法FB(带死区设置和外部复位控制)_RXXW_Dor的博客-CSDN博客关于…
SOPC之NIOS Ⅱ实现电机转速PID控制(调用中断函数)
通过FPGA开发板上的NIOS Ⅱ搭建电机控制的硬件平台,包括电机正反转、编码器的读取,再通过软件部分实现PID算法对电机速度进行控制,使其能够渐近设定的编码器目标值。
一、问题与改进
SOPC之NIOS Ⅱ实现电机转速PID控制_STATEABC的博客-CSDN…

PID算法原理及模板讲解
很早都想写一栏关于PID算法的专栏,整个大学期间把谈恋爱的时间都拿来搞PID算法了(这样你们还不信我是真的搞PID的嘛。。)。为了学习PID算法买过平衡小车之家的平衡车(最后拆成玩具了),买过正点原子的minifl…
输出归一化位置式PID(COTRUST完整梯形图代码)
SMART PLC单自由度和双自由度位置式PID的完整源代码,请参看下面文章链接:
位置式PID(S7-200SMART 单自由度、双自由度梯形图源代码)_RXXW_Dor的博客-CSDN博客有关位置型PID和增量型PID的更多详细介绍请参看PID专栏的相关文章,链接如下:SMART PLC增量型PID算法和梯形图代码…
PID控制逻辑基本介绍
PID控制逻辑基本介绍 1. 源由2. PID基本框图3. PID公式变换4. PID参数释义4.1 比例因子Kp4.2 比例积分Ki4.3 比例微分Kd4.4 Kp/Ki关系4.5 Kp/Kd关系 5. 总结6. 附录6.1 了解 PID 控制,第 1 部分:什么是 PID 控制?6.2 Anti-windup for PID con…

PID控制算法:2、Derivative Kick(微分冲击)
什么是微分冲击Derivative Kick
引入微分,就是为了减少超调量的,但是根据PID的经典公式 就看微分部分 在PID刚开始时,误差值肯定是存在的,但是PID启动的瞬间,这个dt是很小的,这就导致是一个很大的值&#…
1/4车、1/2车、整车悬架PID控制仿真合集
目录 前言
1. 1/4悬架系统
1.1数学模型
1.2仿真分析
2. 1/2悬架系统
2.1数学模型
2.2仿真模型
2.3仿真分析
3. 整车悬架系统
3.1数学模型
3.2仿真分析
参考文献 前言
前面几篇文章介绍了LQR、SkyHook、H2/H∞控制,接下来会继续介绍滑模、反步法、MPC、…

我的PID学习历程---PID位置式和增量式
文章目录起因一、什么是开环系统?二、什么是PID?KP,KI,KD三个参数的作用三、PID算法的离散化1、什么是位置式PID?2、位置式PID实现3、什么是增量式PID?4、增量式PID实现四、采用VOFA调试PIDfirewater协议格…
PLC算法系列之单自由度(1DOF)PID(Simulink+SCL详细代码分析)
在学习了解博途PLC的单自由度PID(1DOF)之前,大家需要具备Simulink的基础知识,PID入门的Simulink基础知识,请参看下面的文章链接:
PID控制入门之PID仿真(Simulink)_RXXW_Dor的博客-CSDN博客离散传递函数模型,更适合嵌入式系统,PLC系统的实现。2、传递函数大家也可以选择…

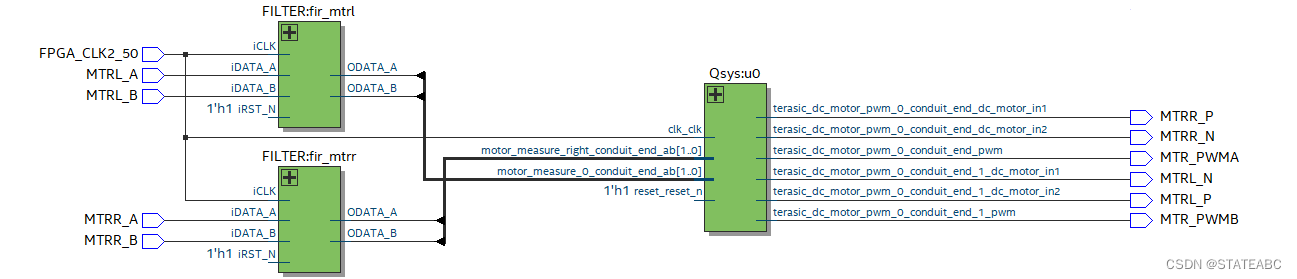
FPGA实现电机转速PID控制
通过纯RTL实现电机转速PID控制,包括电机编码器值读取,电机速度、正反转控制,PID算法,卡尔曼滤波,最终实现对电机速度进行控制,使其能够渐近设定的编码器目标值。
一、设计思路 前面通过SOPC之NIOS Ⅱ实现电…
NXP公司LPC21XX+PID实现稳定温度控制
本例使用的是LPC21XX系列芯片提供的PWM功能实现稳定的温度控制。首先我们获得当前环境温度之后,再用设定的温度与当前温度相减,通过PID算法计算出当前输出脉宽,并将其输出到L298N模块中,使加热丝发热,形成闭环…
C#实现netstat的功能
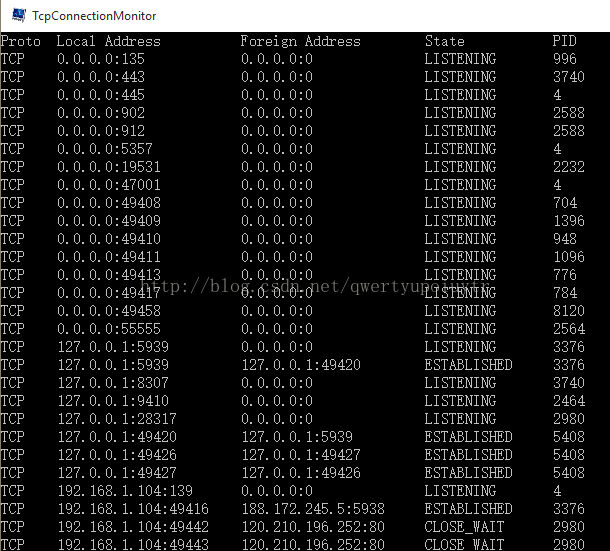
核心思想是调用 WinAPI 中的 GetExtendedTcpTable 方法来获取所有活动的 TCP 连接的信息,包括进程ID等等,主要实现如下:
TcpConnectionTableHelper.cs:
using System;
using System.Collections.Generi…
windows命令行查看和终止进程
文章目录 指令和参数筛选器远程指令tasklist参数 指令和参数
tasklist可以获取当前运行的程序列表。当不加参数时,其返回值包括5列,分别是映像名称,PID,会话名,会话#,内存使用。taskkill用于杀死某个进程&…

windows下查看进程PID
进行一些操作的时候需要知道进程的标识符,大家都知道进程可以在任务管理器中查看,不过我们看不到有PID 标识符。下面简单提供两种查看进程PID的方法: 方法一:设置任务管理器让其显示PID 方法二:使用wmic命令方式 一般我…
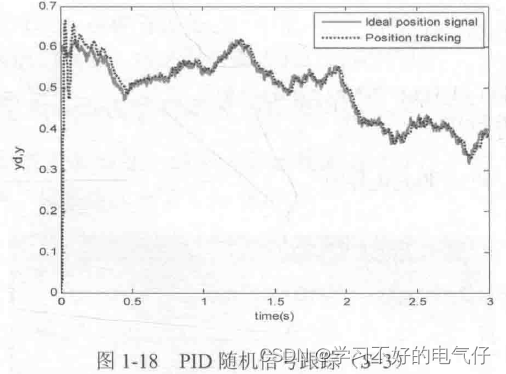
离散系统的数字PID控制仿真-2
设计离散PID控制器,各信号的跟踪结果如图所示,其中S代表输入指令信号的类型。通过取余指令 mod实现三角波和锯齿波。当S1时为三角波,S2时为锯齿波,S3时为随机信号。在仿真过程中,如果 D1,则通过 pause命令实…

PID算法的理解及实现
关于理解PID控制算法最典型的一个例子就是一个漏水的水缸的问题。网上有很多讲解PID的帖子会讲到这个例子。这里我也把我自己对于PID的理解用这个例子阐述一遍。有个漏水的水缸,而且漏水的速度还不是恒定的。然后我们还有个水桶,我们可以控制往水缸里面加…

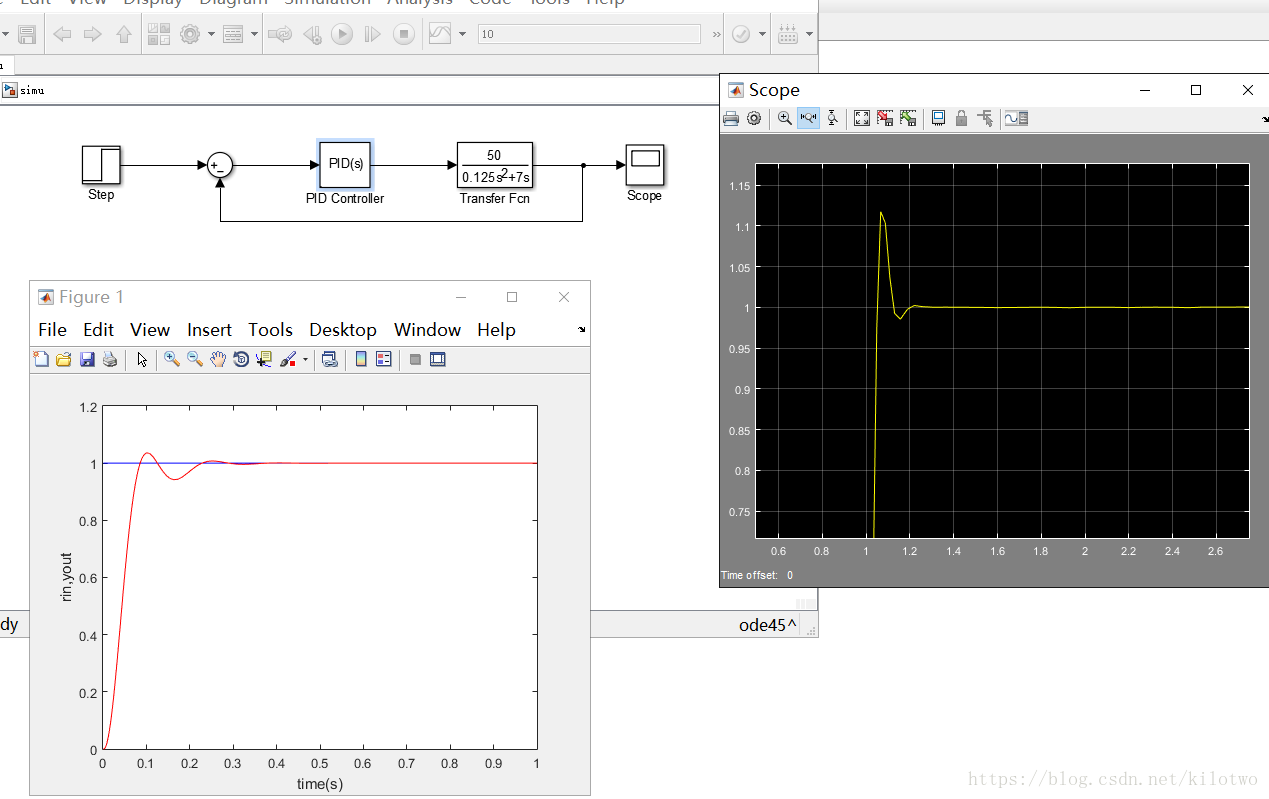
1_simulink简单入门_simulink仿真PID控制
1_simulink简单入门_simulink仿真PID控制 2_simulink搭建RCL_电阻电感电容模块 毕业前想去做物联网还是或者linux,结果玩了一年多的电机控制,早就深知matlab/simulink绕不过的,拖到现在,下班晚上再把大学自控做实验用的matlab捡起…
windows 系统遍历USB设备 VID和PID
常用设备接口类GUID 常用设备接口类GUIDIdentifierClass GUIDGUID_DEVINTERFACE_USB_DEVICE{A5DCBF10-6530-11D2-901F-00C04FB951ED}GUID_DEVINTERFACE_USB_HOST_CONTROLLER{3ABF6F2D-71C4-462A-8A92-1E6861E6AF27}GUID_DEVINTERFACE_USB_HUB{F18A0E88-C30C-11D0-8815-00A0C906…
PID控制算法的一点心得
一、位置式PID和增量式PID实际上是一样的,增量式PID优点更多,可以用位置式PID的系统也可以用增量式PID。
二、积分系统先调P,然后调D,最后调I,比如温控系统、定位系统等 线性系统先调I, 然后调Pÿ…
PID应用时要注意的一些点
仅供参考,时间过久,不再修改 用PID好多次了,用来做过智能车,用来做过四轴.PID不难理解,不难应用,网上也有许多介绍PID的帖子文章什么的,有介绍原理公式的,有讲怎么调节的,资料特别多,我就不写那些陈腔滥调了,我写点感觉网上大多数的帖子没涉及到的或是没…
多旋翼无人机仿真 rotors_simulator:基于PID控制器的位置控制---水平位置控制
多旋翼无人机仿真 rotors_simulator:基于PID控制器的位置控制---水平位置控制前言水平位置控制串级P控制收敛结果收敛过程串级PID控制收敛结果收敛过程结果总结前言
无人机(Unmanned Aerial Vehicle),指的是一种由动力驱动的、无…
全国大学生电子设计竞赛代码-PID篇
配备好的代码输入参数就直接可以用了,个人感觉还是不错的
下面的是头文件
#ifndef _PID_H
#define _PID_Htypedef struct _positional_pid{//PID的基本参数double GoalVale; //目标值double ActualVale; //真实值double Error; //误差double Last…

深入浅出PID控制算法(一)————连续控制系统的PID算法及MATLAB仿真
引言 PID是Proportional(比例)、Integral(积分)、Differential(微分)三者的缩写。PID调节是连续控制系统中技术最成熟、应用最广泛的调节方式。PID调节实质是根据输入的偏差值,按照比例、积分、微分的函数关系进行运算,运算结果用以控制输出。 之前在项…
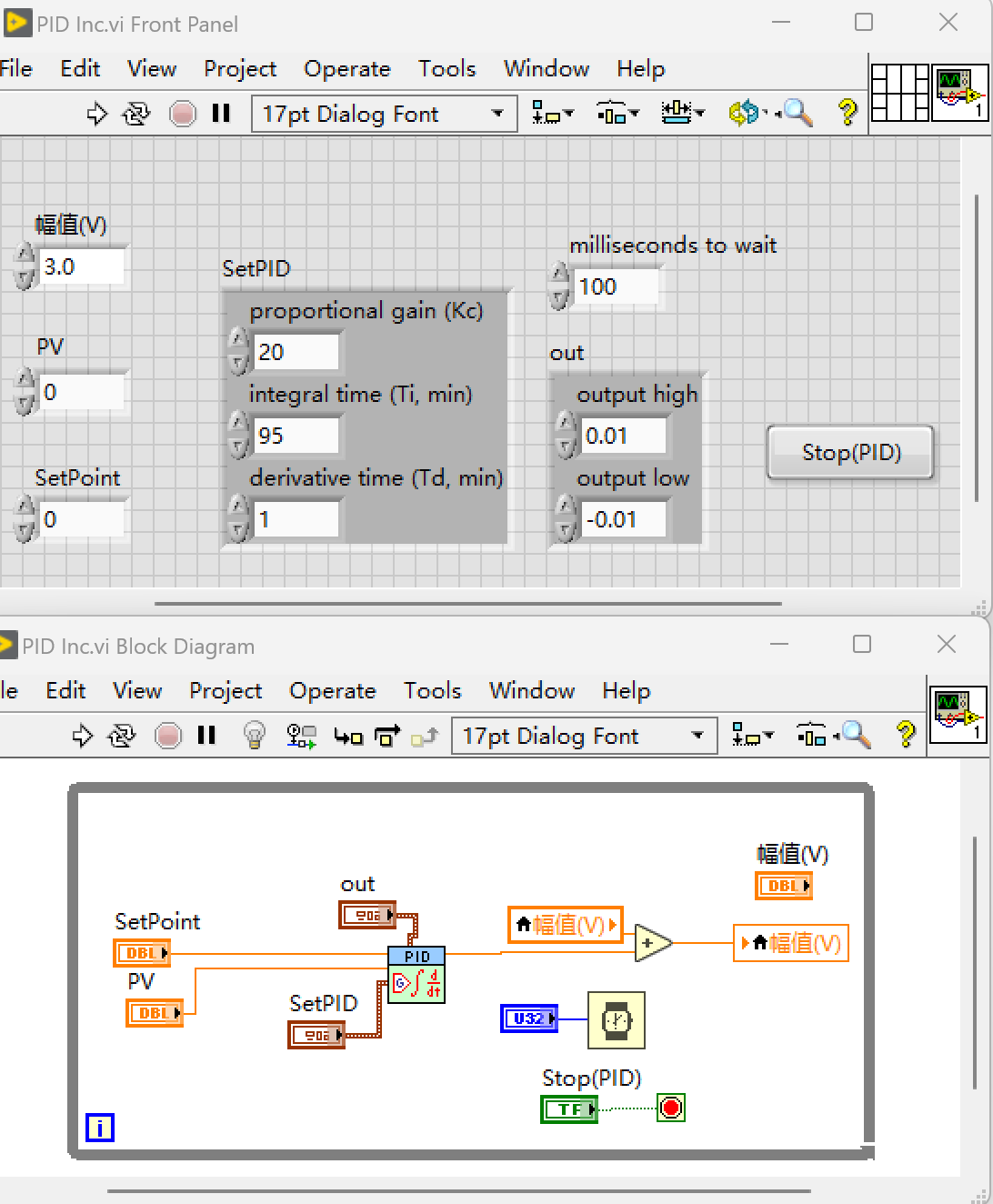
LabVIEW使用PID对激振器控制
LabVIEW使用PID对激振器控制
LabVIEW的PID在许多项目中都会用到,比如温度控制、压力控制、流量控制等,一般用自带的PID通过调节参数的值,基本上都可以解决。现在项目的情况是,通过正弦波的输出控制激振器,输出正弦波的…
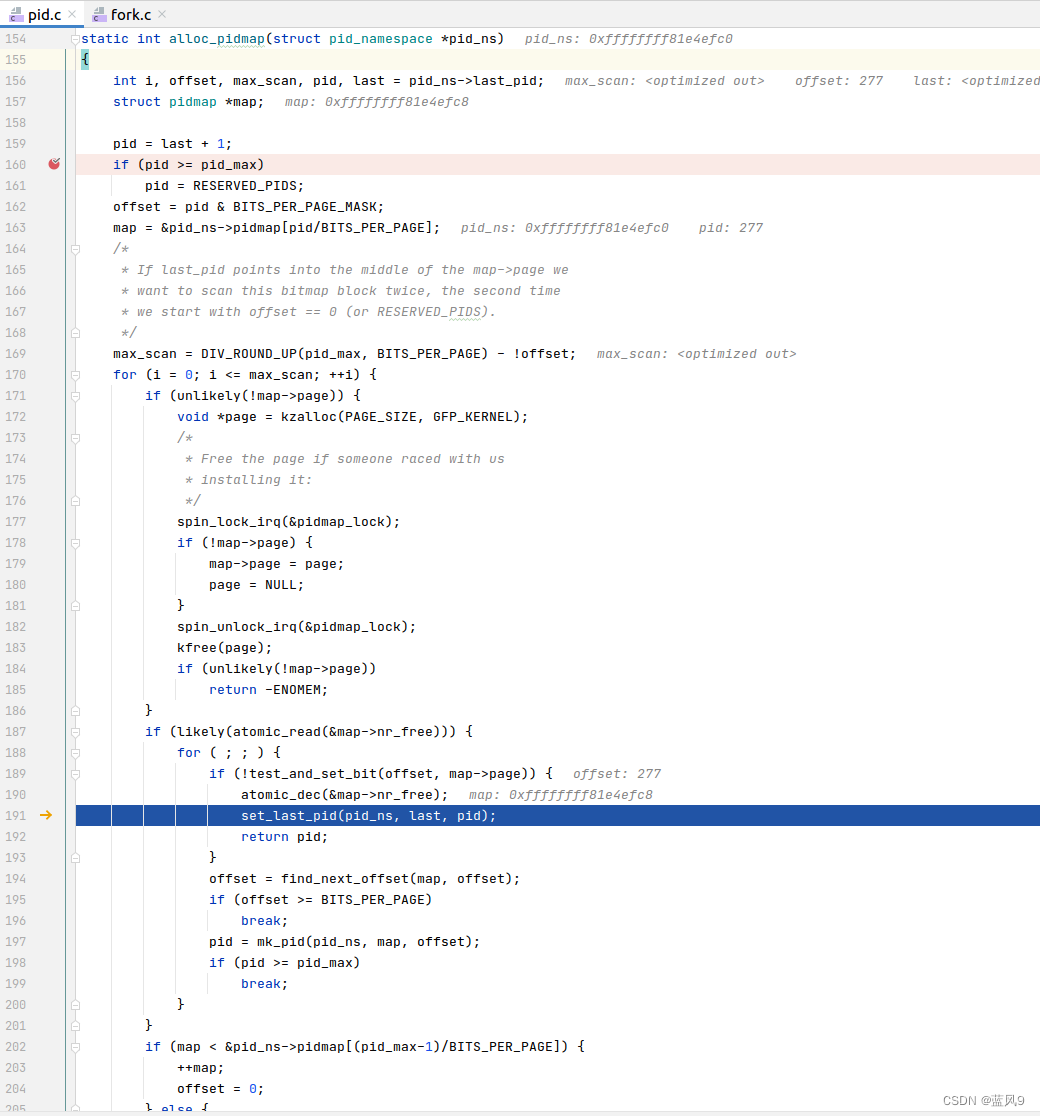
30 linux 新建进程的进程号是如何分配的?
前言
呵呵 进程号是我们经常使用到的, 但是 却从来 没有深究过的东西
这里 就来看一下 具体的进程号的生成方式
linux 新建进程是以 fork exec 的形式创建进程的
子进程 是 复制自 父进程 pid 是怎么生成的?
分配 pid 的地方调用堆栈如下, fork 之后, 会为 新进程 申…
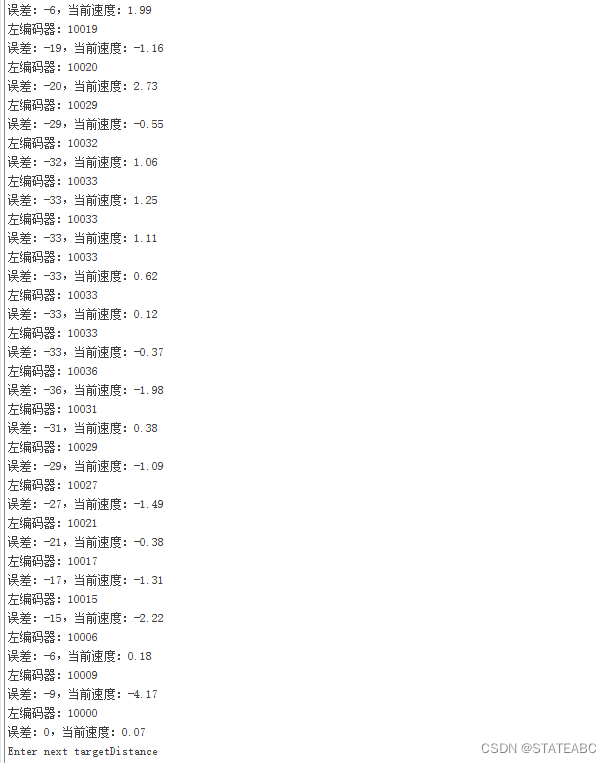
SOPC之NIOS Ⅱ实现电机转速PID控制
通过FPGA开发板上的NIOS Ⅱ搭建电机控制的硬件平台,包括电机正反转、编码器的读取,再通过软件部分实现PID算法对电机速度进行控制,使其能够渐近设定的编码器目标值。
一、PID算法 PID算法(Proportional-Integral-Derivative Algo…
多段曲线控温从Simulink仿真到PLC控制实现
多段曲线温度控制,专栏有系列文章和完整源代码,大家可以自行搜索。链接如下:
博途PLC 1200/1500PLC多段曲线控温FB(支持40段控温曲线、段曲线搜索、暂停、跳段等功能)_RXXW_Dor的博客-CSDN博客多段控温曲线之前专栏的其它文章也有所讲解,大家可以参看下面这篇专栏博途1200…
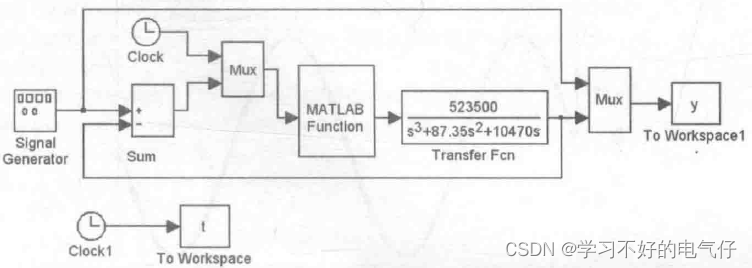
连续系统的数字PID控制仿真-2
被控对象为三阶传递函数,采用Simulink模块与M函数相结合的形式,利用ODE45的方法求解连续对象方程,主程序由Simulink模块实现,控制器由M函数实现。输入指令信号为正弦信号0.05sin(2Tt)。采用PID方法设计控制器,其中kp …
TEC 高精度控温算法
主要实现TEC的指定时间的升温与指定时间的降温,指定温度的恒温,恒温精度实测可在0.01, 上代码
void temp_tec_pid(uint8_t chn)
{ uint8_t i;float mid_fTem1;float mid_fTem2;float mid_fTem3; //参数计算临时值 float mid_fPW…

FPGA实现电机位置环、速度环双闭环PID控制
一、设计思路 主要设计思路就是根据之前写的一篇FPGA实现电机转速PID控制,前面已经实现了位置环的控制,思想就是通过电机编码器的当前位置值不断地修正PID去控制速度。 那为了更好的实现控制,可以在位置环后加上速度环,实现电机位…
PID调控公式和相关方法
pid离散表示: out Kp*(err(k) T/Ti * err1 Td/T * (err(k) - err(k-1) );
out:输出值,pwm输入值。
T采样周期,Ti,积分周期,Td,微分周期,err(k),误差值,err1,误差累积值。 位置型ÿ…
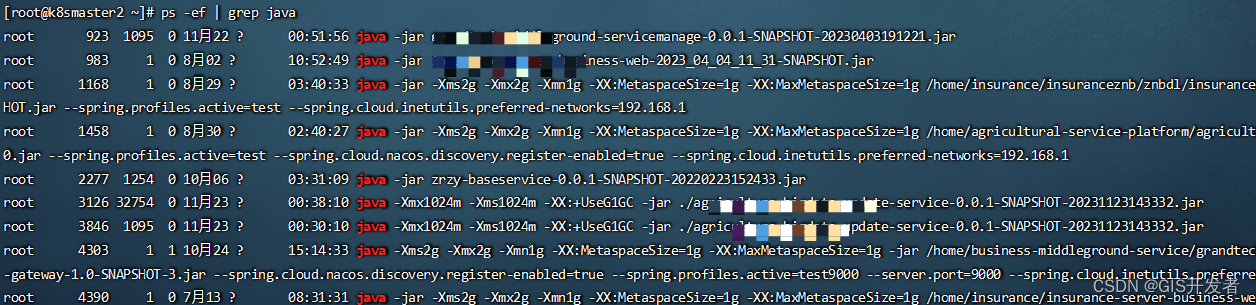
Centos服务器上根据端口号查询jar包,根据jar包查端口号
在开发springboot服务器时,经常会遇到其他人部署的java服务,需要自己维护,留下的信息又非常少。经常面临找不到jar包位置,或者不知道占用端口,不知道启动命令的问题。这里记录一下常用的centos服务器上的命令ÿ…
PID优化系列之给定值斜坡函数(PLC代码+Simulink仿真测试)
很多变频器里的工艺PID,都有"PID给定值变化时间"这个参数,这里的给定值变化时间我们可以利用斜坡函数实现,当然也可以利用PT1 低通滤波器对给定值进行平滑。给定值缓慢变化在很多闭环控制系统里很重要,比如收放卷在初始建张阶段目标值不建议突变容易将卷材拉断(…
深入浅出PID控制算法(二)————PID算法离散化和增量式PID算法原理及Matlab实现
引言 上篇介绍了连续系统的PID算法,但是计算机控制是一种采样控制,他只能根据采样时刻的偏差来计算控制量,因此计算机控制系统中,必须对公式进行离散化,具体就是用求和代替积分,用向后差分来代替微分&#…

Octave实现位置式PID算法
由于Matlab不让用,只能“你不让爷用,爷就用别的”,选择开源的Octave以及scilab进行相关领域的学习。Octave的代码和Matlab几乎是100%相同的,只有一些专用的包的函数,可能有些还没来得及写,或者有些差异。但…
PID输出PWM温度控制(详细介绍PID输出和PWM组合的各种方法)
这篇博客主要介绍PID的输出如何和PWM输出进行绑定,PID控制算法和源代码大家自行查看PID专栏,这里不再赘述。常用链接如下:
位置式PID(S7-200SMART 单自由度、双自由度梯形图源代码)_RXXW_Dor的博客-CSDN博客有关位置型PID和增量型PID的更多详细介绍请参看PID专栏的相关文章…
c语言使用面向对象封装思想,实现PID控制器
面向对象编程是一种抽象。其特质之一为封装。
我们在编程的时候,常讲的模块化编程,而如何去将其模块化,就是我们在设计时的对程序的一种抽象。如果有重构的经验的同学,应该更能体会,某一天发现自己的以前的某个功能模…
c语言使用面向对象封装思想,实现PID控制器
面向对象编程是一种抽象。其特质之一为封装。
我们在编程的时候,常讲的模块化编程,而如何去将其模块化,就是我们在设计时的对程序的一种抽象。如果有重构的经验的同学,应该更能体会,某一天发现自己的以前的某个功能模…
基于PID-bang-bang控制算法的卫星姿态控制matlab仿真
目录
1.课题概述
2.系统仿真结果
3.核心程序与模型
4.系统原理简介
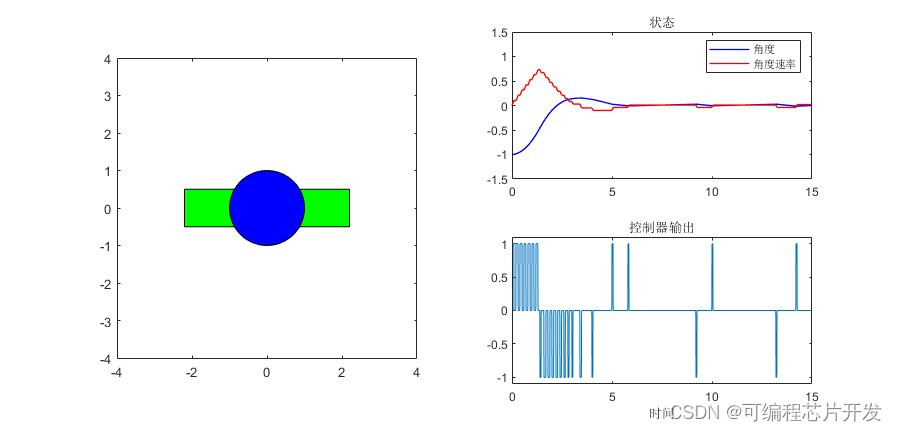
5.完整工程文件 1.课题概述 基于PID-bang-bang控制算法的卫星姿态控制。仿真输出控制器的控制收敛曲线,卫星姿态调整过程的动画。
2.系统仿真结果 3.核心程序与模型
版本:MATLAB…
【Linux系统编程】通过系统调用获取进程标识符 及 创建子进程(fork)
文章目录 1. 通过系统调用获取进程标示符(PID)1.1 进程id(PID)1.2 父进程id(PPID) 2. bash也是一个进程3. 通过系统调用创建进程-fork初识3.1 批量化注释3.2 取消注释3.3 fork创建子进程3.4 fork的返回值3.…

【PID精讲 14 】积分分离PID和抗积分饱和PID
文章目录 一、积分分离PID1.1 积分分离PID算法基本思想1.2 积分分离PID算法实现步骤1.3 积分分离PID算法1.4 积分分离PID算法实现1.5 积分分离PID算法仿真实例1.6 积分分离PID算法的优缺点 二、抗积分饱和PID2.1 积分饱和现象2.2 抗积分饱和算法2.3 抗积分饱和算法实现2.4 抗积…
106基于matlab的粒子群算法与 Simulink 模型之间连接的桥梁是粒子(即 PID 控制器参数)和该粒子对应的适应值(即控制系统的性能指标)
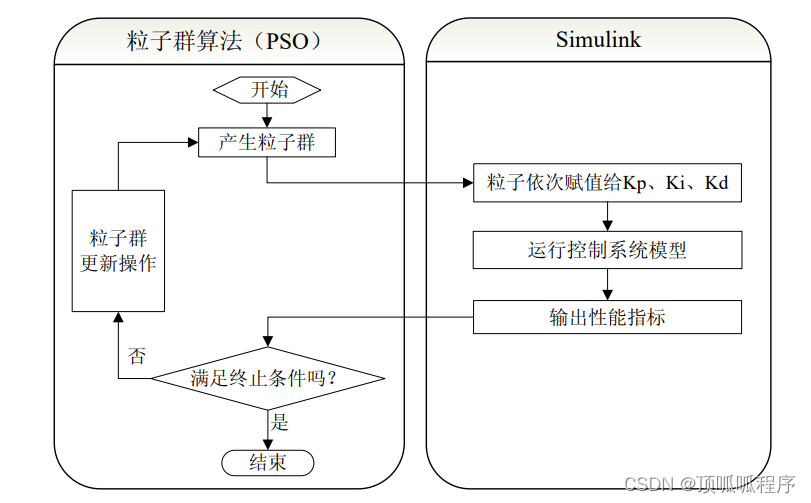
基于matlab的粒子群算法与 Simulink 模型之间连接的桥梁是粒子(即 PID 控制器参数)和该粒子对应的适应值(即控制系统的性能指标)。优化过程如下:PSO 产生粒子群(可以是初始化粒子群,也可以是更新…

全志XR806基于FreeRTOS下部署竞技机器人先进模糊控制器
前言
很荣幸参与到由“极术社区和全志在线联合组织”举办的XR806开发板试用活动。本人热衷于各种的开发板的开发,同时更愿意将其实现到具体项目中。秉承以上原则,发现大家的重心都放在开发中的环境构建过程,缺少了不少实际应用场景的运用&am…

PSO粒子群算法调节PID控制器参数
概述
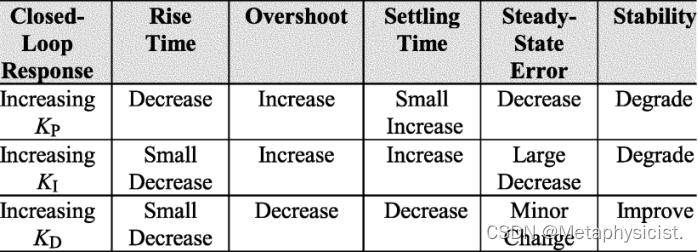
PSO(粒子群算法)在处理连续问题上有着较强的能力,因此很适合用来做参数优化,而PID控制器由三个参数组成,它们分别是: Kp、Ki、KdK_p、K_i、K_dKp、Ki、Kd 我们可以把PID控制器当做一个“黑箱”…
【Docker 内核详解】namespace 资源隔离(三):PID namespace
namespace 资源隔离(三):PID namespace 1.PID namespace 中的 init 进程2.信号与 init 进程3.挂载 proc 文件系统4.unshare() 和 setns() PID namespace 隔离非常实用,它对进程 PID 重新标号,即两个不同 namespace 下的…

抗积分饱和 PID代码实现,matlab仿真实现
抗饱和PID
前几天开始我就计划把c电机仿真的PI控制器代码优化一下的时候,群里刚好讨论了Microchip的AN1078文档中的PI框图: 在这里插入图片描述
找了点视频和文章,大家感兴趣可以去看看,相信你会收获更多。 TI的公开培训 &…

ADRC控制算法仿真(基于MATALB和Simulink)
ADRC控制算法仿真(基于MATALB和Simulink)首先放仿真结果仿真文件下载重要提示:这个仿真存在一些错误,仅供参考。(经评论提示,仿真中存在一些问题,但这个帖子时间已经比较久了,做这个…
linux识别/查询/结束进程
一、识别原始进程
系统的原始进程是init,init的PID总是1。
一个进程可以产生另一个进程,除了init以外,所有的进程都有父进程。
二、查看进程的指令:ps [options]
ps命令查找与进程相关的PID号: ps a 显示现行…
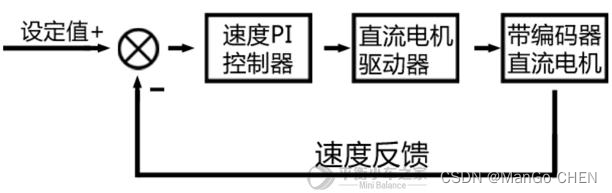
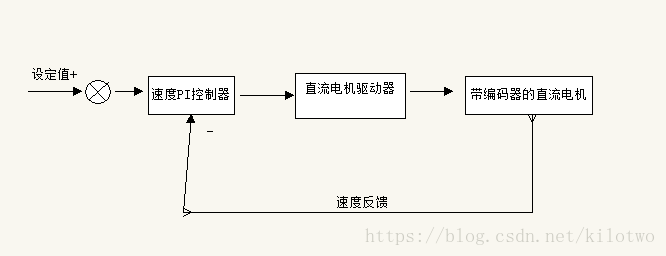
直流电机 PID 开发指南学习笔记
直流电机 PID 开发指南
(基于【平衡小车之家】直流电机 PID 学习套件 1.0) 目录
1.位置闭环控制
1.1 理论分析
1.2 控制原理图
1.3 C 语言实现
1.4 参数整定
2.速度闭环控制
2.1 理论分析
2.2 控制原理图
2.3 C 语言实现 PID 调节器出现于上世…
输出归一化位置式PID(完整梯形图代码)
SMART PLC单自由度和双自由度位置式PID的完整源代码,请参看下面文章链接:
位置式PID(S7-200SMART 单自由度、双自由度梯形图源代码)_RXXW_Dor的博客-CSDN博客有关位置型PID和增量型PID的更多详细介绍请参看PID专栏的相关文章,链接如下:SMART PLC增量型PID算法和梯形图代码…
PID算法在流量控制中的应用
目录
增量式或位置式
目录
增量式或位置式
PID控制周期
T1 时间
T2 约4ms
PID C代码 最近有小伙伴向我提问关于PID的问题:通过比例阀控制水流速度(流量),
使用增量式还是位置式 PID?他的比例法驱动频率是500Hz…

FOC专题--环路PID算法拆分分析
foc中,其实foc算法并不是最难理解的,反而是在其中使用的PID算法,之前我只会套用别人的代码,但并不理解其中的各参数含义,导致在实际调整PI参数的时候,很难调到合适的值。 在实际理解什么是PID算法以及各参数…
深入浅出PID控制算法(三)————增量式与位置式PID算法的C语言实现与电机控制经验总结
前文对PID算法离散化和增量式PID算法原理进行来探索,之后又使用Matlab进行了仿真实验,对PID三个参数又有了更深入的认识,接下来我们来使用C语言进行PID算法实现,并且结合控制电机的项目来深入学习。 1、PID 算法C 语言原代码
先贴…

基于BP神经网络的PID自适应控制——simulink平台(详细分析过程+完整代码+仿真结果)(一)
基于BP神经网络得PID自适应控制——simulink平台(详细分析过程完整代码仿真结果)(一)一、神经网络简介和人工神经元模型1. 连接权(突触权值)2. 求和单元(加法器)3. 激活函数…
如何提高PID控制器离散化精度(SCL+梯形图代码)
通常采样率(执行频率)1/Ts的典型取值为闭环带宽的5~10倍。实际上大部分工程采样率范围会使我们所期望的闭环性能下降,要忽略采样造成的影响,采样率至少是典型值的10倍。原则上,采样率1/Ts在允许的计算能力范围内越大越好。当采样率较低时,提高PID控制器离散化精度的一种方…
【神经网络学习笔记】PID神经元网络解耦控制算法
%% 该代码为基于pso算法优化的PID神经网络的系统控制算法
%
%% 清空环境变量
clc
clear%% 粒子初始化
%粒子群算法中的两个参数
c11.49445;
c21.49445;
%最大最小权值
wmax0.9;
wmin0.1;
%最大最小速度
Vmax0.03;
Vmin-0.03;
%最大最小个体
popmax0.3;
popmin-0.3;maxgen50; …
平衡车+速度/位置pid+野火上位机移植+Freertos+cubemx(一)
平衡小车野火pid上位机移植程序源码已经上传,需要的可以下载。**一.首先下载STM32CUBEMX****二.配置相关单片机和相关功能**1.配置时钟和debug引脚2.开启freertos3.相关功能以及引脚的配置这里使用的相关功能有:TIM1 编码器模式 用于记录左轮的编码器TIM…

对传统PID控制算的优化改善
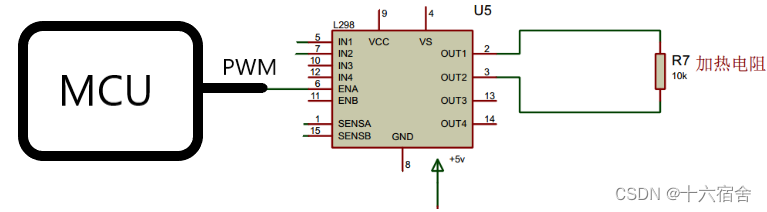
针对传统PID控制算法的优化 一,原理图 根据原理图,MCU通过输出0~100%占空比的PWM来控制温度;通过ADC0808来采集温度
二,PID控制代码
void PIDCalu(PID_para *pid )
{ pid->Yn 0.3906*GetADC(); pid->En pid-&g…

Linux进程管理 | 进程
目录
一.进程 一.进程
1.进程的定义
进程(Process)是计算机中的程序关于某数据集合上的一次运行活动,是系统进行资源分配和调度的基本单位,是操作系统结构的基础。简单的理解为正在运行中的程序。即执行时,将程序加…
PID应用于电机驱动系统中的简单讲解
所谓PID指的是Proportion-Integral-Differential。翻译成中文是比例-积分-微分。 记住两句话: 1、PID是经典控制(使用年代久远) 2、PID是误差控制() 对电机转速进行控制还要: 1、变频器-作为电机驱动&…